

栃木市レッスン風景SPIKE【ロボットカーの制御3】距離センサーを活用したプログラムを考えて課題をクリアしよう!
本日はLEGOエデュケーションSPIKEの授業となります。
ここのところ連続で行っているSPIKEの授業のクラスで、前回作成した【ロボットカー(ドライビングベース)2】の続きの課題にチャレンジしてもらいました。
チュートリアルで課題を確認しよう

前回の続きとなりますが、今回の課題は4つのカラーブロックを一つ一つ回収して戻るといったチャレンジとなります。
前回の授業では、距離センサーを使用してブロックを回収することが出来ましたが、今回も同じ考え方で行ってみましょう!

さらに、ルールも確認します。
①距離は30cmに設定する。
②キューブを分解して、4本の色付きのリレー用バトンにする。
③マーカーから色付きのバトンを1度につき1本集めるようなプログラムを作成する。
④届けられた時と同じように各バトンをドライビングベースから取り外す。
となっています。
フムフム!一つずつ回収すればいいんだね!
そうなると、前回と考え方は一緒ですね!
前回学んだプログラムを参考に、アレンジしていけばおのずとすべてのブロックを回収できそうです!!
プログラムを考えてみよう!
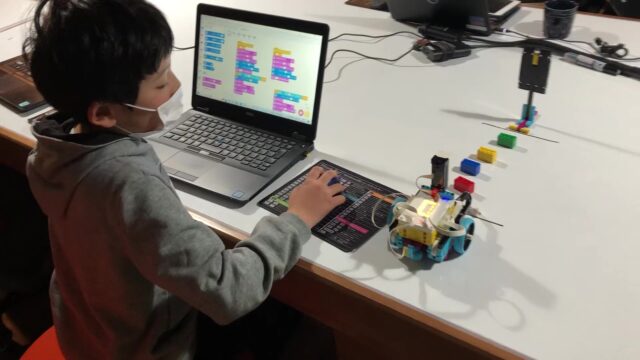
ルールの通り、ブロックを30cmの距離に並べます。
距離センサーが反応するためのエンドパーツ(黒い壁)を30cmに、実際に回収するブロックを30cm以内に収まるように並べました。
え~わからないよ~・・・!!
と及び腰になってしまった生徒たちに、ひとつづつ順番に考えていこう!と声をかけて考えてもらいました。
まずは一番手前のブロックです。
最初、自分たちでいろいろ試行錯誤して考えてくれていましたが、どうやらセンサーを使用するのではなく、時間やモーターのスピードで調整をしていました。
なるほど!確かにそれも間違いじゃないね!!素晴らしい!!
でも、今回は『距離センサー』を使ったプログラムで考えてみよう!と声をかけなおして、もう一度チャレンジ!


「出来た~」というので試しに動かしてもらいました。
すると・・・?3つのブロックを一気に回収して戻ってきました。
そしてドヤっと『Good!!』のポーズ!いやいやいや、Goodじゃないんだわ(笑)
でも惜しい!!
1つずつでいいんだよ。一つずつ回収するためには、距離センサーが反応するエンドにおいてある黒い壁から何センチ離れているか?を考えてみよう!
距離センサーの反応する距離を細かく設定しよう
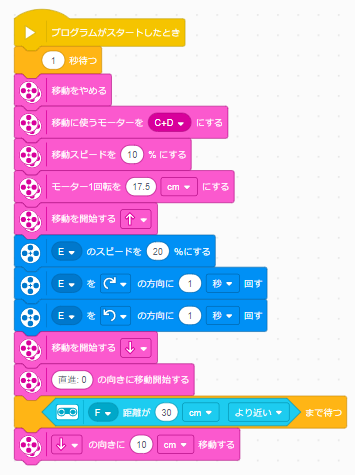
今回の課題のポイントは、距離センサーの反応する距離の設定です。
センサーが反応する黒い壁から逆算して手前一つ目のブロックは何センチ離れたところにあるかな??
その距離をプログラムに落としていきましょう!
ひとつめで『ピン!』ときたA君は、「わかった!!!」といってサクサクとプログラムを作ってくれました。
そしてH君も!
プログラムが完成したら、一つ目のブロックを回収してみましょう!!
いい感じ!!戻る距離が長すぎて、テーブルから落ちそうになってドキドキ!!
H君は楽しそう!!楽しいなら何よりですけどね(笑)
すべてのブロックを回収して行こう!
一つずつ実行していきましょう!!
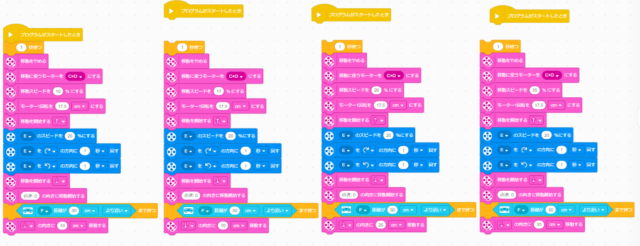
何度も実行し、検証を繰り返して距離を設定していきました。
同時に、スピードやアームをあげるタイミング、戻る距離など様々なところを微調整して、最終的に講師に発表してもらいました。
そして、見事!4つのブロックを回収することが出来ました!!
生徒たちは講師に頼ることなく、自分たちで何度も検証し、プログラムを修正して課題に取り組んでくれました!!
今回もよく出来ました!よく頑張りましたね!!
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら