

レッスン風景【猿の綱渡り】クランク機構ってどんな動き?モーションセンサーで障害物を避けよう!
LEGO Educationシリーズの、WEDO2.0を使った授業です。
本日のカリキュラムは【猿の綱渡り】です。
完成図を見てみんなで「なに猿?ゴリラかな?」「え~?ナマケモノじゃない??」とワクワクしながら作り始めました♪
このロボットで使われるクランク機構とは?
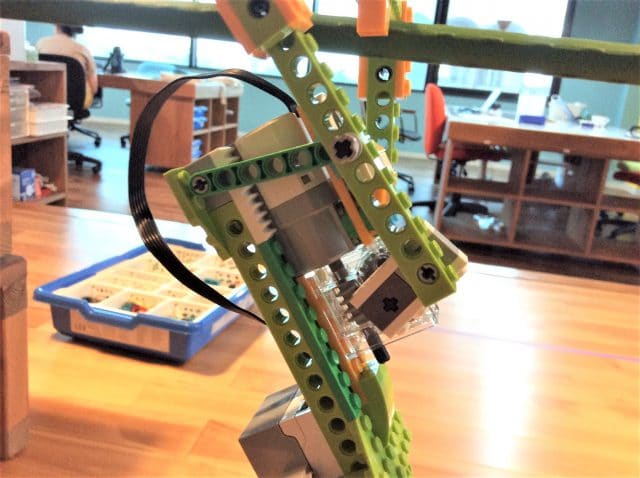
《 クランク機構はクランクピン・スライドピン・ロッドを組み合わ組み合わせたもので、回転運動や往復運動を行うリンク機構の1つです。》
1つのモータを介して、左右の腕が左右交互に動作することで、綱を渡るように前進します。
今回のお猿ロボットでは、モーターの回転が両腕の前後往復運動へと変換されています。
完成&プログラムしよう!

動かすにはプログラミングが必要ですね!
まずは前へ動くプログラム。
【スタート⇒速度⇒回転方向⇒動く時間】を設定することで動かすことが出来ますね!
ウォームギアを使っているので、動作はゆっくりしています。
時間も一桁ではあっという間に終わってしまうので、二桁の時間を設定したりしました。

モーションセンサーを付けよう
時間で前後に動かすのではなく、次のステップでは【モーションセンサー】を取り付けて障害物を検知したら自動的に後ろへ下がるプログラムをしてみます。
そのためにはまず、猿のロボットにモーションセンサーを取り付けます。
取り付ける位置は自由です。
どの位置がベストか、自分たちなりに考えて作っていきましょう!
その過程で邪魔になった足や顔をアレンジ!時間の許す限り、アレンジを繰り返したら、猿からどんどん進化していきました(笑)

こんな感じに動きます
ハラハラドキドキの綱渡り!
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら