

レッスン風景【猿の綱渡り】リンク機構を取り入れる
LEGO Educationシリーズの、WEDO2.0を使った授業をご紹介します。
今日のカリキュラムは猿の綱渡りです。猿のロボットを作り、ロープや枝を前や後ろに進ませていきます。
お猿をつくる
LEGOの組み立てが少し複雑になります。
両腕が前後に動き綱を渡っていくのですが、細かい微調整が必要となります。
また、このロボットは『リンク機構』という構造を取り入れていますので、より精度の高い組み立てが必要となります。
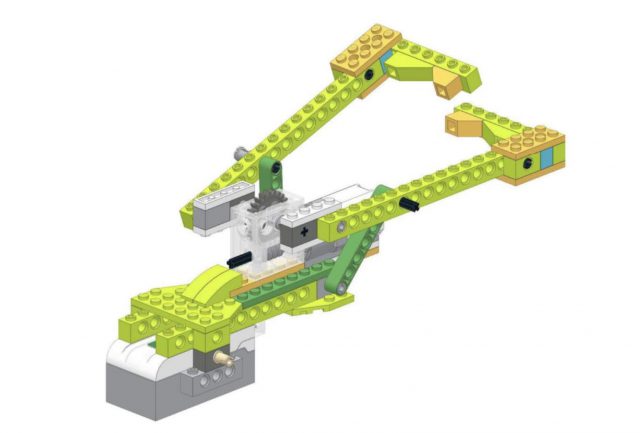
リンク機構とは?
《 部材をいくつか組み合わせて、力や運動を伝える機構がリンク機構である。》
今回のお猿ロボットでは、モーターの回転が両腕の前後運動へと変換されます。
-640x443.jpg)
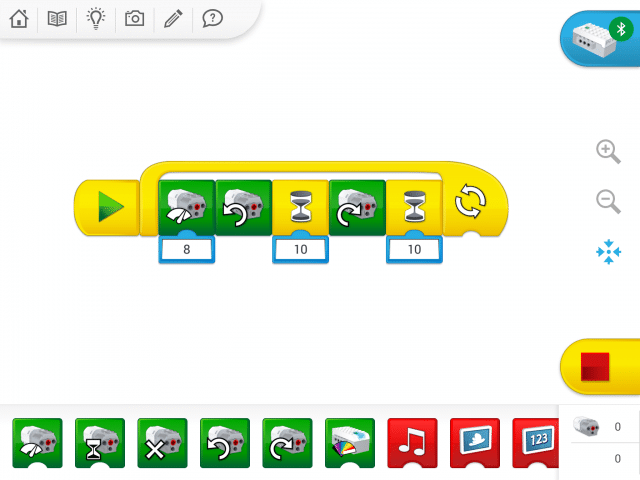
プログラムを組む
課題は前へ進んだら後ろ戻るを繰り返す、です。
単純な動きの繰り返しなので、生徒さん自らに考えてもらい、下記のようになりました。
失敗もチラホラ・・・
組み立ての微調整がうまく行かないと、お猿の顔が外れたりしました・・・
また、ロープがたるんでいるとモーターに負荷がかかりすぎて、最大出力の10のパワーを設定すると腕がもぎれます・・・
そのため、猿の背中の空洞を補強したり、回転するアームの位置をずらしたりと、それぞれが工夫をして改善を行いました。
猿の綱渡り成功!
成功です!!
負荷が少なくなるように、ロープではなく枝(棒)を模して渡らせてみました。

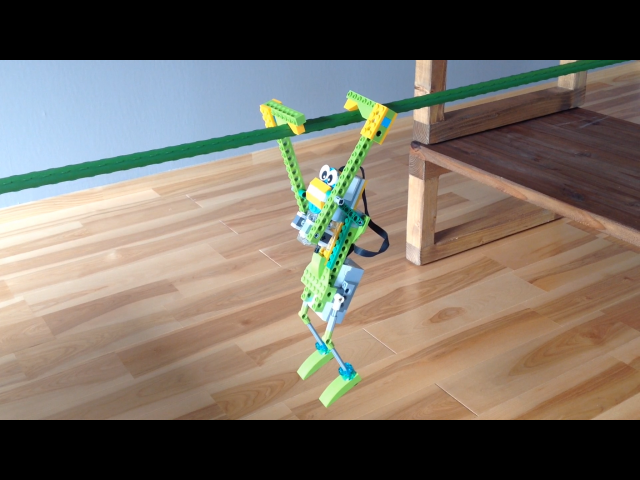
 お猿の動きが可愛くて、子どもたちも大満足!
お猿の動きが可愛くて、子どもたちも大満足!
今回はこれでタイムオーバーになりましたが、モーションセンサーをつけることで、障害物を見つけたらストップさせたりすることもできます。
*********************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくりの無料体験を行っております。
授業で実際に使用しているレゴ®WeDo2.0を使ってロボットを組み立て、動かしてみるところまでを体験いただけます。
お気軽にお申し込みください!
無料体験のお申込みはこちら