

レッスン風景【マイロ調査】協力して目的地にたどり着く!
LEGO Educationシリーズの、WEDO2.0を使った授業をご紹介します。
今日のカリキュラムは【マイロ調査】です。
一人でマイロを組み立てるカリキュラムでは、マイロ君はモーションセンサーを使って【センサーで物を発見する】ということを行いました。
作ったマイロ君は【前後】にしか動きません。
今回の課題は、『2台のマイロを使って、目的地までたどり着く』です。
目的地は正面ではなく、進行方向から横にずれています。
それぞれのマイロでは前後にしか動かないロボットを、どのように組み合わせ、どのよう操作すると【左右】へ動き、目的地にたどりつくことが出来るでしょうか?
それぞれのマイロロボットを作る
真剣です!

2台をつなげる
それぞれが作ったマイロを、横につなぎ合わせました。
考えてみよう!
2台のマイロをどのように操作すると、前後だけではなく左右に曲げることが出来るでしょうか?
★曲がるには?・・・どちらかが進む。どちらかが止まる。
★進むには?・・・一緒に進む。
プログラム
2人それぞれがiPadを使って、各々のマイロを動かすプログラムを組みました。
①進む
②止まる
2つの簡単な操作プログラムを組みます。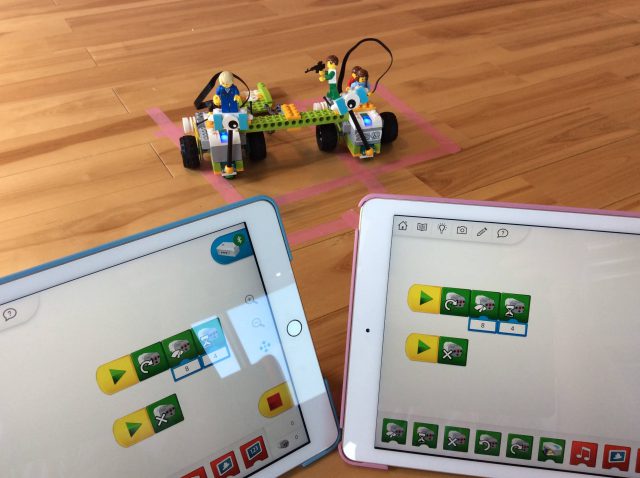
指示を出す
さて、2人で操作するには指示がとても重要です。
今回は兄弟でチャレンジしましたので、お兄ちゃんに重要な【指揮官】という役目をお願いしました。弟くんはお兄ちゃんに指示に従って進む、止まる、のプログラムを操作します。
2人でカウントダウン!
「3,2,1,スタート!」 元気よく揃ってスタート!
元気よく揃ってスタート!
前に同じ速度で進みます。
目的地のラインまで進んだら、お兄ちゃんが左のマイロを操作している弟くんに指示を出します! 「ストップ!」
「ストップ!」
弟くんは上手にストップさせました。
すると、マイロは左へ旋回しました。
90度、向きが変わったところで、止まってしまいました。
プログラムに時間が設定されていたからです。
そこで、もう一度2人揃ってスタート!
ゴールでは指揮官がまた「ストップ!」の声掛けで、今度はふたりともプログラムをストップさせました
ゴール!
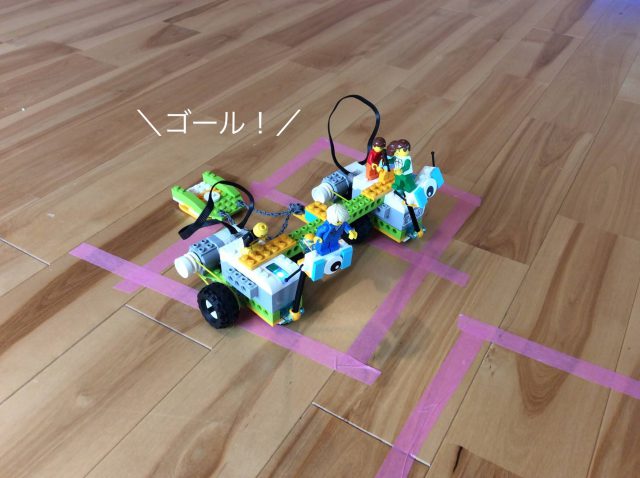 無事、ゴールエリアまでたどり着くことが出来ました。
無事、ゴールエリアまでたどり着くことが出来ました。
途中、何度もやり直しました。
プログラムに秒数を設定してしまったので、目的地に着く前に止まってしまったりするたびに秒数を微調整したり、2台のマイロがまっすぐ進まなかったりと、トラブルは多かったのですが、根気よく、最後まで考えながら、協力して取り組んでくれていました!
このあと、ゴールエリアを右へ左へ作り、何度もチャレンジしていましたよ!
*********************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくりの無料体験を行っております。
授業で実際に使用しているレゴ®WeDo2.0を使ってロボットを組み立て、動かしてみるところまでを体験いただけます。
お気軽にお申し込みください!
無料体験のお申込みはこちら