

レッスン風景【ミニ四駆】コースで走らせてみました!
ミニ四駆、2回目の授業です。
前回は設計図とにらめっこしながら、なんとか組み立てを終わりました。
本日は子供たちも楽しみにしていた『走行』です。
ノーマルでの走行
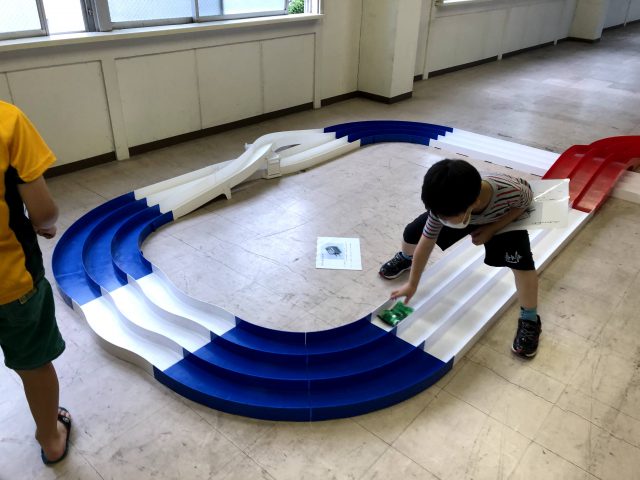
まずは『設計図通り』・『セット部品』のまま走らせてみました。
初めてのコース走行は生徒たちも大興奮!!
より早く走るには?
次に、早く走るために改造を施します。
モーターを変えてみることにしました。
下記の3つのモーターから選ばせてみました。
◆アトミックチューン2モーター

モーターの回転数***12700~14900rpm
※rpm・・・1分間の回転数/数字が大きいほど平らな道で速く走れる
トルク***1.5~1.8N・m/数字が大きいほどコーナーや上り坂で力を発揮する
◆パワーダッシュモーター

モーターの回転数***19900~23600rpm
※rpm・・・1分間の回転数/数字が大きいほど平らな道で速く走れる
トルク***1.5~2.0N・m/数字が大きいほどコーナーや上り坂で力を発揮する
◆スプリントダッシュモーター

モーターの回転数***20700~27200rpm
※rpm・・・1分間の回転数/数字が大きいほど平らな道で速く走れる
トルク***1.3~1.8N・m/数字が大きいほどコーナーや上り坂で力を発揮する
検証走行
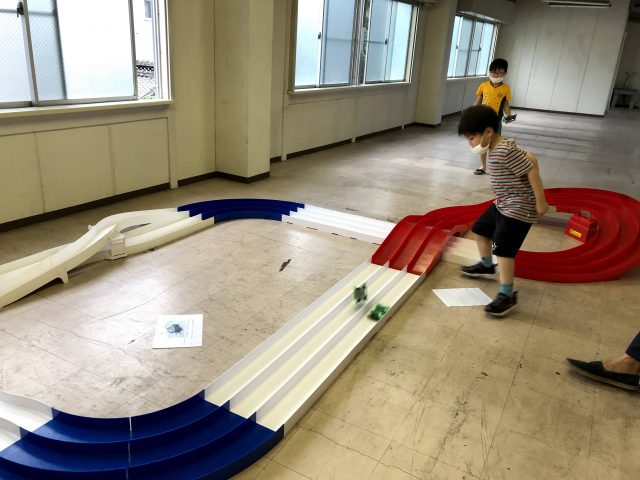
速い!速い!!
でもコースアウトの連続です!!!遠心力でマシンが飛び出してしまいます。
生徒たちはモーターを変えたことにより早くなった自分のミニ四駆に再度大興奮!
 しかし、ここで終わりに出来ません。
しかし、ここで終わりに出来ません。
コースアウトしてしまっては速さを競うことが出来ないので、更に改造を施します。
気になるポイントは着地のときの衝撃とカーブの時の遠心力です。
次回の授業では、更に部品を足して速く・且つ・スムーズ走行を目指して行きます。
講師陣も自分たちのミニ四駆を改造し、生徒たちを迎え撃ちます!!
*********************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくりの無料体験を行っております。
授業で実際に使用しているレゴ®WeDo2.0を使ってロボットを組み立て、動かしてみるところまでを体験いただけます。
お気軽にお申し込みください!
無料体験のお申込みはこちら