

栃木市レッスン風景【フォークリフト】メッセージブロックを使って、複数の動作をプログラミングしよう!
ロボテックの各教室では発表会のカリキュラムもいよいよ大詰めですが、入会間もない生徒さんは通常授業を行っています。
今日はLEGO Educationシリーズの、WEDO2.0を使い、【フォークリフト】のカリキュラムの授業をご紹介します。
組立てスタート!

必要なWedo2.0のパーツ名を覚えよう
wedo2.0のパーツの中で、『ギアラック』と『ウォームギア』といったパーツを使います。
初めて使うパーツだったので、名前もしっかり覚えました!
)ギアラック
ギザギザした直線のギアです。
丸いギアの回転運動を、このギアラックで直線運動へ変換します。

)ウォームギア
ウォームギアとは、円形ギアとかみ合って機能する、らせん状の溝が付いたねじのようなパーツです。
ウォームギアが、円形ギアを回転させることができ、組み合わせて使用します。
また、より大きなパワーが必要な時に使用します。
今回はフォークリフトということで、モーターの動きを速く回転させることより、ゆっくりとパワーを必要とする動きにするために使用しています。

チルトセンサーを使ってコントローラーを作る
wedo2.0には3つのセンサーがあります。
①モーションセンサー⇒物体との距離を検知
②チルトセンサー⇒傾きを検知
③音センサー⇒音に反応
このなかで、コントローラーをして今回使用するのが『チルトセンサー』です。
写真を見て、センサーをどの向きに取り付けると、どんな傾き(動き)が出来るのか、考えながら組み立てました。

メッセージブロックを使ったプログラミング
プログラムは『メッセージブロック』を使用しました。
通常プログラムは、物事を順序だてて進めていきます。
◆例えば・・スタート⇒進む⇒音を鳴らす⇒ライトを点灯する⇒止まる
といったように、一つ一つのタスクを順序だてて進んでいきます。
しかし、同時に複数の動作をさせたいときは、『メッセージブロック』を使うことで解決できます。
◆例えば・・・スタート⇒進む(と同時に)
⇒音を鳴らす(と同時に)
⇒ライトを点灯する(と同時に)
といったプログラムです。
今回のフォークリフトではチルトセンサーを使ったプログラムを作りましたので、条件は・・・
◆スタート⇒チルトセンサーが前に傾いたら⇒10のパワーでモーターを左回転させる(をくり返す)
⇒チルトセンサーが後ろに傾いたら⇒10のパワーでモーターを右回転させる(をくり返す)
⇒チルトセンサーが水平になったら⇒モーターの動きを止める(を繰り返す)
実際にwedo2.0でプログラミングを作るとこんな感じです。
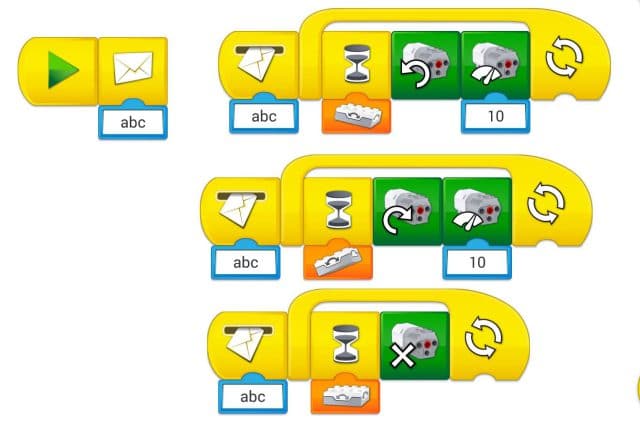
メールのブロックがメッセージブロックです。
送る側と受け取る側のプログラムブロックが必要です。
受け取る側はポストの絵ですね!
また、黄色い砂時計は『待機ブロック』です。
それぞれ、チルトセンサーが条件の傾きになるまで待つ(待機)することで、モーターを自在に動かすことが出来ます。
実走!
実際に動かしてみると・・・?
上手に動かすことが出来ました!
この後、モーターの動きを『リフト』だけではなく、『タイヤ』の方へ伝わるように各自に考えてもらい改造を施しています。
プーリーとベルトを上手に使って改造することが出来ました!
こちらは組立図があるわけではないのですが、よーく観察することで、課題を解決することが出来ました!

**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら