

栃木市レッスン風景【クレーンゲーム】LEGO wedo2.0でクレーンゲームを作ってお菓子をゲットしよう!
本日のカリキュラムは、LEGO wedo2.0のカリキュラムです。
ゲームセンターで大人気の『クレーンゲーム』ですが、wedoでも2つのモーターを使用することで作ることが出来ます!きちんと作ることが出来たら、お菓子をゲットしてみよう!また、2つのモーターをプログラムするやり方も学んでいきましょう!
クレーンを組み立てよう

クレーンゲームのクレーンを組み立てましょう。
今回はモーターを2つ使用します。どこに使われているかというと、1つ目は支柱の部分です。中心の支柱がぐるぐると回転するようにしています。
2つ目はアーム(紐)の部分が上下するように紐を巻き取ったり伸ばしたりする部分に使用しています。
完成してから実際に動かすときに2つのモーターがたくさん動きます。組み立ての段階で、グラグラと不安定な部分があれば補強して壊れにくくしていきましょう。
さあ、完成できたかな?
wedo2.0とアプリを接続してプログラムを作っていこう!
次に、プログラムを作っていきます。
本日の課題は2つのモーターの動かし方を学ぶことですが、いつものように完成したロボットの電源を入れて、アプリと接続します。
接続が完了すると、画面の右下に今接続されている2つのモーターが表示されています。
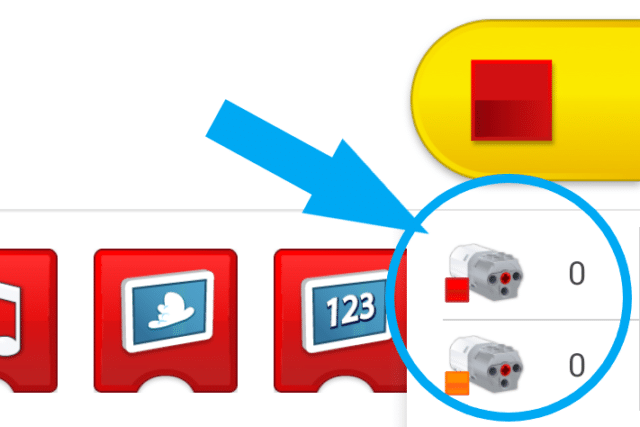
よく見ると、それぞれのモーターに【色】が指定されていますよね!
この色を元にプログラムを付けていきましょう。
基本のプログラムはいつもの通り【スタート/モーターのパワー/モーターの回転方向/モーターを動かす時間】があれば動きますよね。
問題は2つのモーターそれぞれを別に操作したいということです。
ここで必要になってくるのがモーター1つ1つに割り当てられている【色】となります。
組み立てたプログラムがどのモーターのプログラムか、を色で指定していきましょう。
プログラムブロックを長押しすることで、色が選択できるようになります。ここで大切なのはすべてのプログラムブロックで色で選択することです。指定がないとモーターが混乱してしまいます。
それを踏まえてプログラムを作ってもらいました。
どちらのモーターがどの色なのかも動かしながら確認しました。
試しに操作してみよう!
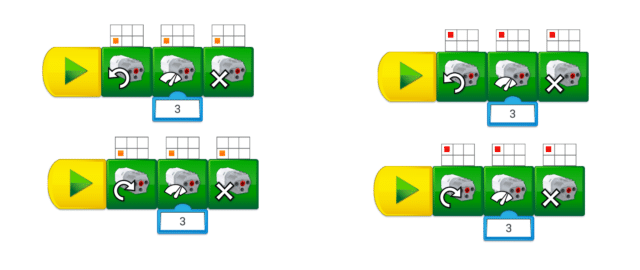
まずは支柱のプログラムです。
コードが付いているため、同じ向きに回り続けるとコードが絡まってしまいます。どうしようか?と相談して、逆回転のプログラムも作ってもらいました。
また、回転速度も速い為アームがブンブン動いてしまいます。ここもどうするか考えて修正してもらいました。
支柱の動きが確認出来たら今度はアーム(紐)の動きをプログラムしましょう。
紐を巻き取るプログラムと紐を伸ばすプログラムです。
これも支柱と同じプログラムですよね。プログラムを作ったら試しに動かしてみて紐が上手く巻き取れませんでした。
そこで、重しに磁石を取り付けてもらいました。
また、それでも上手く巻き取りません。
原因はどこだろう??生徒自身に観察して原因を探ってもらいました。
するとどうやら紐のたどる道がずれてしまうようです。ポイントに気づいたらずれないように修正・工夫をしてもらいました。
うんうん!いい感じ♪
お菓子をゲットしよう!
いよいよ本番です!
クレーンの周りにお菓子を配置し、プログラムで操作します。
アームの紐の先とお菓子に磁石を取り付けて、ゲームスタート!!
お菓子の配置も難しい!でも何度か試してみたら別のモノを釣り上げてしまいました!(選んだお菓子の1つが大きかった為、別のブロックを代わりに配置しました。)狙ったモノと違くてもOK!現実のクレーンゲームでもよくあるよね!
やはりお菓子をとるカリキュラムは楽しいよね!ワクワクしながら最後まで集中して取り組んでくれました!
本日学んだこと
今回は2つのモーターのプログラムの作り方を学びました。また、モーターの働きがどこに伝わっているのかもわかりやすかったと思います。
基本的なことですが、wedo2.0で【ハブ】の電力が【モーター】を動かし、そのモーターの働きが【ギア】【プーリー】【車軸】を通して【タイヤ】などに伝わることでロボットが動きます。
組立図があると意識しなくても動くので忘れてしまいがちですが、ここはとっても大事な部分ですので忘れずに理解しておきましょう!
本日も良く頑張りました☆彡
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら