

栃木市レッスン風景【科学探査機マイロ】wedo2.0の2つのセンサーを学ぼう!
本日は入会まもない生徒さんの授業です。
教材はwedo2.0を学んでいますが、この教材には3つのセンサーがあります。そのうちの2つ『モーションセンサー』と『チルトセンサー』を使用し、センサーの役割について学んでもらいました。
一つ一つじっくりと取り組んでいきましょう!
目次
基本のロボットを組み立てよう!
まずはアプリ内の動画を再生してどんなロボットを作るか確認してもらいました。
本日作る『科学探査ロボットマイロ』は、通常人間が立ち入ることのできない危険な場所に、代りに行って探査し、発見したものを報告してもらうためのロボットです。
動画を確認し終わったら、組立図に沿って組み立てていきます。
途中、ブロックとブロック同士の隙間もしっかりチェックしてくれました。隙間が空いていると完成後に正常に動かないことがあります。
組み立ての段階から、早さばかりにとらわれずに、正確さも意識して取り組んでもらいました!
完成!プログラムを組んで動きを確認しよう
組み立て工程は長くないので手早く完成させてくれました!
まず最初にすべきことは、動作確認です。
【モーターを/〇のパワーで/〇秒動かす】・・・といった基本のプログラムを組み立ててもらい、また、ゴール位置にピッタリと停止できるように【時間】や【スピード】を調整してもらいました。

モーションセンサーを取り付けてみよう!
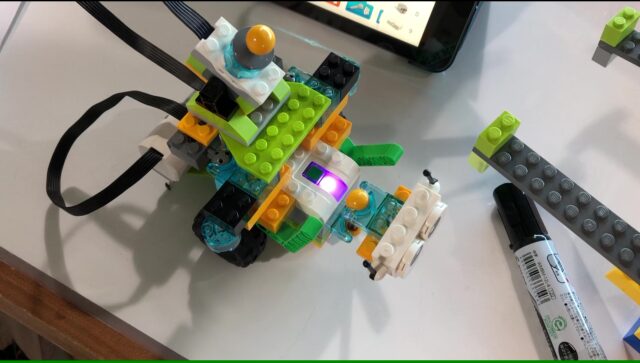
さあ、続きまして【モーションセンサー】を取り付けていきます。
カリキュラムに沿ってモーションセンサーの役割についても学んでいきます。
*モーションセンサーとは?
物体との距離を検知するセンサー。『近づいてきたら』『離れていったら』『横切ったら』・・・などといった変化を細かく検知し、プログラムすることが出来ます。
基本のプログラムから修正しましょう。
モーションセンサーはオレンジ色のプログラムブロックです。黄色い砂時計『待機ブロック』と組み合わせて使用します。
プログラムが出来たら、発見する【物】をブロックで作ってもらいました。
マイロは何を発見できるのでしょうか??


大きなロボットを発見しました!
発見したら(センサーが検知したら)止まるって音を鳴らして知らせるようにプログラムしていますので、しっかりと音で知らせてくれました!
チルトセンサーに付け替えてみよう!
続きましてwedo2.0のもう一つのセンサー【チルトセンサー】を使用してみます。
*チルトセンサーとは?
傾きを検知するセンサーです。『右に傾いた時』『左に傾いた時』『上向きに傾いた時』『下向きに傾いた時』『揺れたとき』『水平の時』・・・といった傾きを検知します。

今回はコントローラーとして使用しました。
物を発見した時に、下向きに傾けると【色】で知らせてくれます。
また、発見したものを文字で知らせるためにプログラムで【画面表示ブロック】を使用して、上向きに傾けると文字で知らせる動きも作りました。

自由にアレンジしてみよう
2つのセンサーを使用し、役割を十分に理解してもらったら、残りの時間で好きにロボットをアレンジしてもらいました。
各々オリジナリティあふれる作品が完成しました。
また、授業の最後にはカリキュラムのまとめを行い、本日使用した2つのセンサーの名前を復習しました。
まだ入会まもない生徒さんでしたので、これからたくさんのロボットを作っていくと、自然にパーツの名前や役割を覚えて行けることと思います。
焦らなくても大丈夫です!楽しみながら学んでいきましょう!
本日もよく頑張りました☆彡

**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら