

佐野ベースレッスン風景【魚つり/ロボットアーム】お菓子取りゲームをしよう!
佐野ベースでも、LEGO Educationシリーズ、Wedo2.0を使った授業の中で「お菓子取りゲーム」を行いました。
レッスンの内容を一部ご紹介いたします!
魚釣りを楽しもう!
ある回のレッスンでは【魚釣り】のカリキュラムを行いました。
釣り竿に、傾きを検知してくれる「チルトセンサー」を取り付けて、釣り竿の傾きに応じて、自動で釣り糸を垂らしたり巻き取ったりできるようにプログラム作成をしていきます。
「センサーの傾きを検知したら」→「モーターの向きを指定して回す」という基本の流れは一緒ですが、生徒さんそれぞれのオリジナリティあふれるプログラムが出来上がりました!

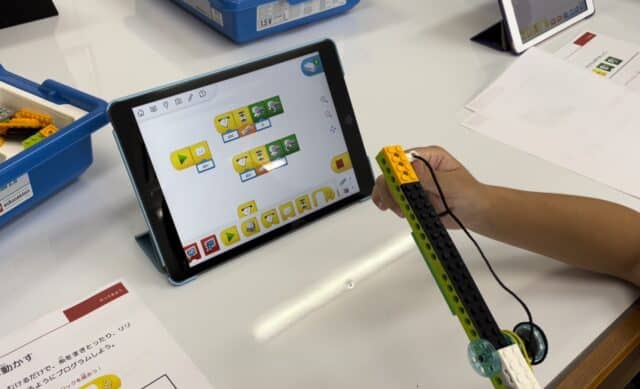

さて、動作確認ができたら次は実践です。
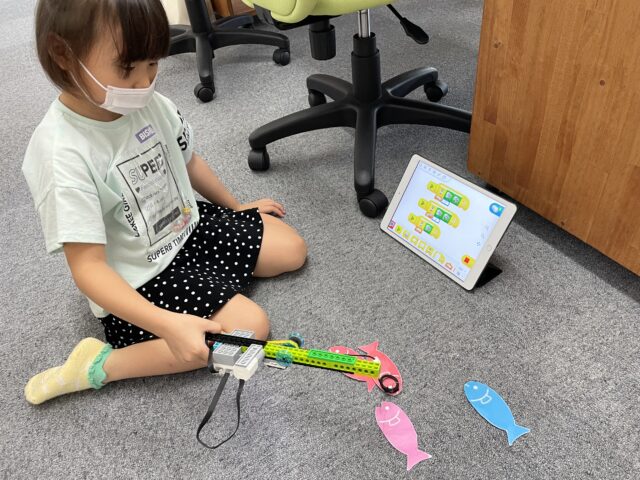
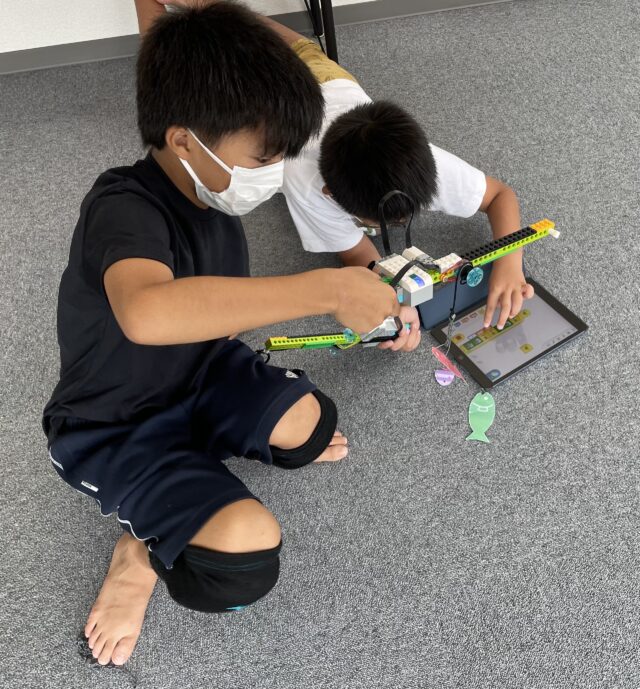
みんなプログラムの力を上手に使って、上手に魚を釣り上げてくれました。
「手の力を使うんじゃなく、センサーとモーターの力を使おうね!」という制約のもと、魚を無事釣ることができたら、お菓子と交換するレクレーションを行いました。
みんなルールを守ってがんばってくれました!


ロボットアームでモノをつかもう!
また、別の回のレッスンでは【ロボットアーム】のカリキュラムを行いました。
まずは、人間の手の代わりに働いてくれる「手の形をしたロボット(=ロボットアーム)」をレゴで作ります。
次に、ロボットアームに取り付けたモーションセンサーを使って、物を検知したタイミングで自動でアームが開くようにプログラムします。


動作確認は、レゴで作ったお花などを摘んで練習しました。
・・と、ここまでは、教材付属のお手本通りに組み立てればできてしまいますが、これだと「モノを検知したらロボットアームを開く」→「指定秒数後にロボットアームを閉じる」という動作で終わってしまいます。
「お花をつかむ」ところまでは問題ありませんが、
最後に「掴んだお花を置く」ことをしたい場合は、どうしたらいいかな?
そうです、指定の位置へ移動したら、「ロボットアームを開いてモノを離すようにする」必要がありますね!
みんな、それぞれの方法でプログラムに手を加えて実現してくれました。
最後に、好きなお菓子をロボットアームで掴むというレクレーションをやりました。


レゴで作った部品と違って、お菓子のパッケージは柔らかいので意外と掴みづらい!ということで、お菓子を立てておくスタンドをレゴで用意したりと、工夫してがんばってくれました!
まとめ
プログラムは正解がひとつではないので、どうすれば意図通りに動くかな?ということを考える過程は、とても大事ですね。
お菓子という戦利品がある!ということで最後まで楽しみつつも、
これまでのレッスンの復習になったようで良かったです!
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら