

栃木市レッスン風景【科学探査機マイロ②】2台のマイロをつなげて動かしてみよう!
本日のカリキュラムはLEGO wedo2.0の授業で、【科学探査機マイロ】の続きとなります。1度目のマイロの授業では、『モーションセンサー』や『チルトセンサー』を取り付けて、センサーの役割等を学びました。
今回は、2台のマイロをつなげて、右へ左へ動くようにコントロールしていきます。
どの様につなげて操作するのでしょうか??
目次
1台のマイロのカリキュラムを復習する
まずはマイロロボットを組み立てます。
組み立てが完了したら、1台マイロを動かすプログラムを作って復習してもらいました。
①モーター時間オンブロックを使用する
スタート位置とゴール位置を決めて線ピッタリで止まるように、【時間】を設定してプログラムしてみよう。
入会して間もない生徒さんにはこちらをしっかりと理解できるように学んでもらいました。

②モーションセンサーを使用する
次にモーションセンサーを使用して、物を発見したら自動で止まり、音で知らせるようにプログラムしてみましょう。
【待機ブロック】と【モーションセンサー】のプログラムブロックの組み合わせで出来ますよね!

③チルトセンサーを使用する
最後はチルトセンサーを使用して、物を発見したらレバーを前に倒して音を鳴らす/発見できなかったらレバーを後ろに倒してライトを点灯させる。・・・といったプログラムを作ってみましょう。
チルトセンサーは取り付ける位置や取り付け方も考えてもらわないとなりません。
チルトセンサーは傾きを検知するセンサーですので、その特性を理解できていると、どの位置に付ければよいのか、おのずとわかりますよね。
2台のマイロをつなげて荷台を取り付ける

復習が終わったら、本題に入ります。
2台のマイロを接続して、荷台を取り付けてもらいました。発見したアイテムは荷台に乗せて持ち帰ります。
2台つなげたマイロは2つのモーターが付いていますので、2台のタブレットで操作します。
1台で操作するやり方ももちろんありますが、今回は2台のタブレットを協力して操作して動かしていきましょう。
プログラムを作る
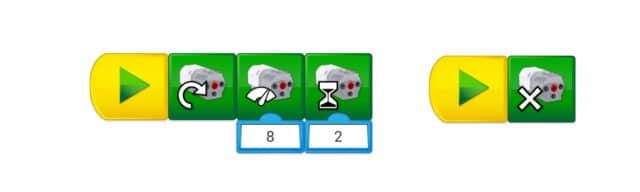
それぞれのマイロのプログラムは同じです。
≪進む≫プログラムと≪止まる≫プログラムを用意しました。
モーターの回転時間を設定していますがなくても大丈夫です。しかし、2秒くらいに設定しておくと、自動で止まるので焦らず操作出来そうですよね。そこは生徒たちにお任せします。
2台つなげるとどのように動くか確認しよう

さて、アイテムを回収する旅に出る前に、作ったプログラムを動かしてみてどのような動きをするのかを確認した上で、スタート位置からゴール位置までアイテムを回収しながら進んでいくルートを確認しましょう。
【直進】⇒右マイロも左マイロも同じ速度で進む
【右折】⇒右マイロを止めて、左マイロを進める
【左折】⇒右マイロを進めて、左マイロを止める
・・・このような感じでコントロールしていきましょう!
アイテムを回収してゴールを目指せ!
さあ、本来なら2人で協力して取り組む課題ですが、今回は1人でやってみたい!!とのことでしたので1人で操作してもらいました。
テーブルに2個のアイテムをセッティングしたので、それを回収しながら進んでもらいました。



とっても上手にコントロールしてくれました。
本来ならさらに、2台を1つのタブレットで操作することまで学べるカリキュラムですが、今回は時間の関係でここまでとなりました。
2台を1つのタブレットで操作する方法は、【サッカーゲーム】や【対戦型ゲーム】などのカリキュラムでも学ぶことが出来ますが、また別の機会のチャレンジしていきましょう!
本日もよく頑張りました☆彡
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら