

栃木市レッスン風景【科学探査機マイロ君】人の代わりに活躍するロボットを作ろう!
今回は、LEGO wedo2.0で作る、探査機ロボット【マイロ】を作りました。
このカリキュラムでは、モーションセンサーやチルトセンサーを使ったプログラムを学ぶことが出来ます。
今日から初めて授業の生徒もいらっしゃいましたので、組み立てがあまり複雑ではないこちらのカリキュラムで、ゆっくりじっくりと取り組んでみました。
人が入れない危険な場所って?
最初に、これから作るロボットは何のために作るのか。をお話ししてみました。
ロボットは人の代わりに作業をしてくれます。
特に、人にはできないこと、入れない場所で行う作業をロボットが担ってくれます。
人が入れないような『危険な場所』ってどんなところかなぁ??と問いかけて、皆で考えてみました。
「海の中!」
「火山の上!」
「宇宙!!」
それぞれ意見を出してくれました。
さぁ、そんなところで代わりに活躍してくれるマイロロボットを作っていきましょう!
組み立てよう
設計図を見て組み立てます。
完成に時間差があったので、先に完成した生徒には、自由にデコレーションをしてもらいました。
飾り付けをしたり、運転手を乗せて、運転席を作ったり・・・。
並べて走らせるときに、それぞれオリジナルのロボットになったので、間違えなくていいですね♪


動かしてみよう
次にプログラミングです。
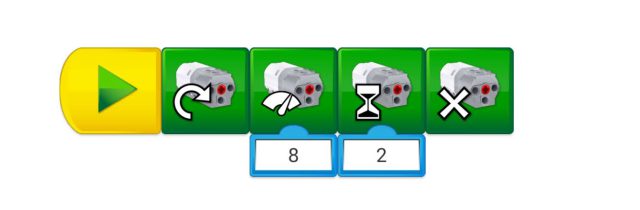
まずは前に動かしてみます。
【スタート⇒前方向に⇒8のスピードで⇒2秒進んで⇒止まる】というプログラムを作りましょう。
動きを確認したら次のステップです。
モーションセンサーを取り付けよう
モーションセンサーは、物体との距離を検知してくれるセンサーです。
人が入れないところで、マイロロボットが物を発見した時に、自動で教えてくれるプログラムを作るために、ロボットにモーションセンサーを取り付けました。
そして、プログラムも修正します。
【スタート⇒前方向に⇒8のスピードで進む⇒モーションセンサーが物体を検知したら⇒止まる⇒音を鳴らして知らせる】


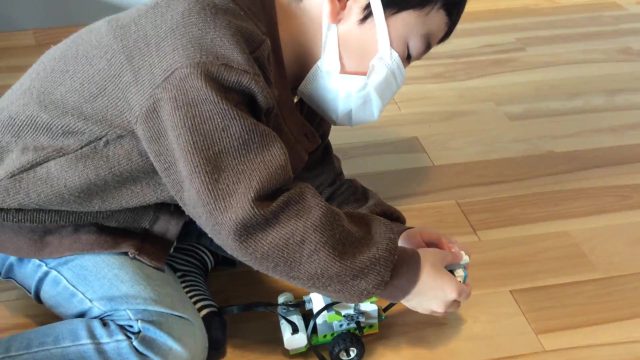
探査開始!
プログラムが出来たら、発見するものを作って探査開始です!
広いところで、物体まで距離があったりしたので、なかなか発見に至らなかったりもしました・・・。


さらに、発見した時の音にこだわったり、センサーの向きを調整したりと、じっくりと何度も修正しながら取り組んでくれましたよ♪
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら