

レッスン風景【科学探査機ーマイロー】モーションセンサーで物を発見しよう!作ったロボットを二人で操作しよう!!
今日は科学探査機【マイロ】を作っていきます!
このカリキュラムは段階があり、【一人で操作する⇒モーションセンサーを付ける⇒チルトセンサーを付ける⇒2台つなげて二人で操作する⇒一人で2台のマイロを操作する】ことを学ぶことが出来ます。
90分の中ですべてを行うことは難しいですが、今日は【モーションセンサーを付ける】ことと、【2台つなげて二人で操作する】ことにしぼって学んでいきます。
マイロが活躍する場所は?


探査機はどんなところで活躍するでしょうか?人が住むことのできない過酷な環境の場所を調査するときに役立ちます。
たとえば、月や火星、危険な場所など、人が入り込めないところで活躍しそうですね!
このようなところでは、人が遠隔で操作をして、物を動かしたり、運んだり、サンプルを拾ったりすることにロボットたちは役に立っています。
組み立てて動かしてみよう!
組み立てたら試しに動かしてみます。
プログラムは【前方向に⇒8のスピードで⇒2秒進んで⇒止まる】とします。
動くことが確認出来たら、プログラムの時間を調整してみました。
『ここまで動かしたら止まるようにしてみよう!』
という課題を与えて、プログラムを調整します。
時間やスピードを変えることで、目的地ちょうどで止めることが出来ますね。
モーションセンサーを取り付けてみよう!
次にモーションセンサーを取り付けます。
遠隔操作するにしても、遠方では見えない障害物などが存在するかもしれませんね!
そこで、マイロ君に目をつけることで、自動で止まったりすることが出来るようになります。
その『目』となるのが【モーションセンサー】です。
モーションセンサーは距離を検知するセンサーですね!
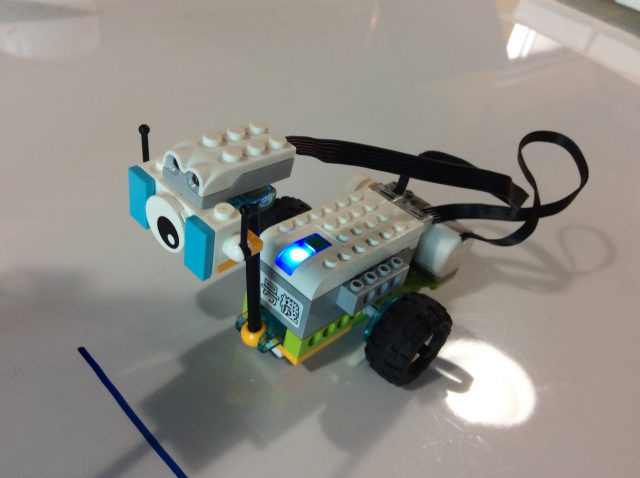

プログラムでは、センサーが物を検知したら止まって音を鳴らす、としました。
2台のマイロをつなげてみよう!

自分が作ったマイロと、お友達が作ったマイロをつなげます。
2台を協力して操作するには??
それでは、2台を協力して操作します。
なぜ2台つなげたかというと、1台だけでは前か後ろにしか進まないロボットだからです。
実際に現場では右へ行ったり左へ行ったり、対象物を探しながら動かしていくでしょう。
そこで、2台をつなげて右へ左へ曲がれるようにしました。
具体的にはどうやって??
つなげたマイロの形をみて、考えてみましょう!!

左右に並べて繋げました。
自分が作ったマイロがどちらか変わりやすくするために、一人は顔を変えて作ってくれました。
左右のマイロはそれぞれ動かすことが出来ます。
右へ曲がるには??
そうです!【右へ曲がるときは右のマイロはストップ/左のマイロは前に進む】とすればどうでしょう??
協力して動かして人形を回収しよう!


大事なことがあります!
2人が息を合わせること!ですね。
どちらかが号令を出すことにしました。
スタート!ストップ!!の掛け声に合わせて、各々が自分のマイロを操作します。
向きを確認しながら1体ずつ回収しました!


見事!5体の人形を回収して回ることが出来ました!
すぐに操作を理解してくれたので、スムーズに進めることが出来ましたよ!
このカリキュラムには続きがあり、今度は一人で二台のマイロを操作します。
またの機会にご紹介しますね!
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら