

レッスン風景【ゴミの分別】ゴミ収集車を作ろう!
LEGO Educationシリーズの、WEDO2.0を使った授業をご紹介します。
今日のカリキュラムは【ゴミの分別】です。
地球上では毎日たくさんのゴミが出ています。
でも、ゴミを再利用(リサイクル)できれば、ゴミではなく資源になります。
資源ゴミを形や大きさに応じて分別する【ゴミ収集車】をつくって動かしてみましょう!
組み立て
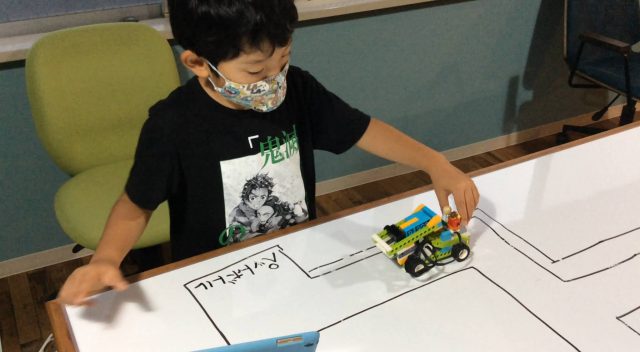
荷台のついたトラックを作りました。
この荷台は、モーターで動くように組み立てています。
プログラム
このトラックは荷台にモーターをつなげていますので、走行は手押しになります。
それを踏まえて、プログラムを考えていきます。
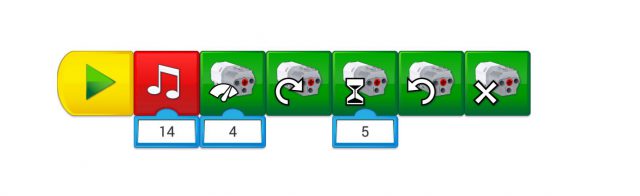
※プログラムは、【音を鳴らす→荷台を傾ける→5秒待つ→荷台を戻す】という順番で組み立てました。
ゴミを回収しに行こう!
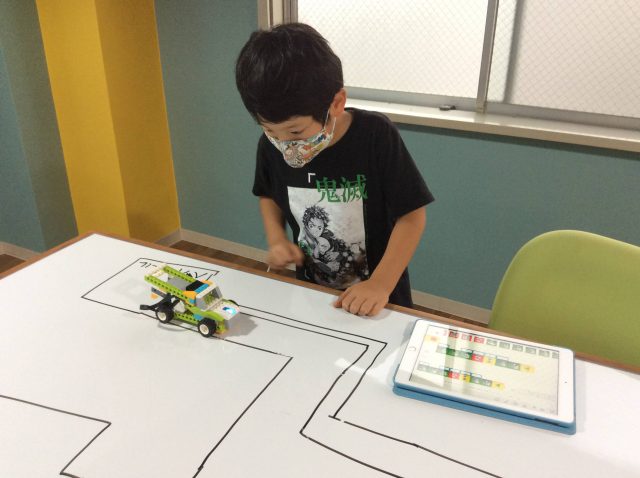
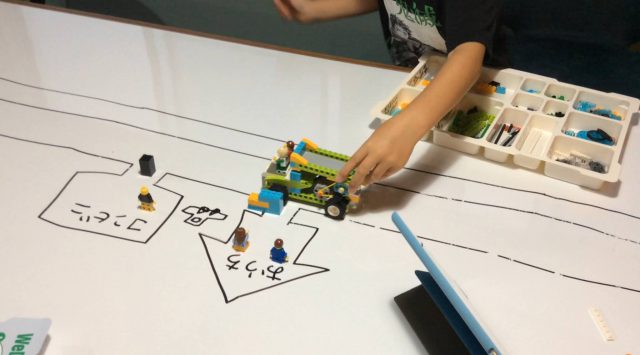
テーブルに道路と【粗大ゴミ】を出したいお家、【ペットボトル】を出したいコンビニを描き、その先には、分別したゴミを回収するゴミステーションを描きました。
試しに、【ペットボトル】だけを回収して捨てに行きます。
トラックに荷台に載せたら【ペットボトル】のゴミステーションへ移動し、荷台をプログラムで動かし捨ててきます。
ゴミが荷台から落ちるのをしっかり確認しています。
無事、運搬できました!
ゴミの分別
それでは、【粗大ゴミ】を出したいお家と、【ペットボトル】を出したいコンビニ、を回り、それぞれのゴミを回収し、さらに、適したゴミステーションで『ゴミを分別して』捨てていきます。
課題
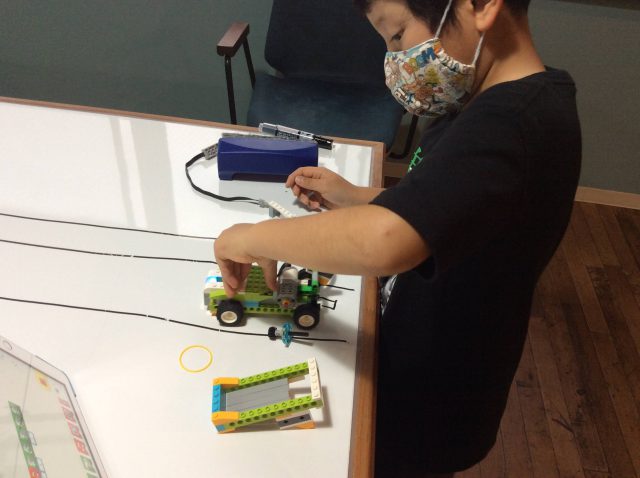
ところが、作ったゴミ収集車の荷台では、ペットボトルは捨てられても、粗大ゴミは荷台から落ちません・・・。
ここは自分なりに考えて荷台の形を改造してみました。
確認OK!!
ゴミを分別してリサイクルしに行こう!
ルートはこうです。
①粗大ゴミを出したいお家まで移動する。
②粗大ゴミをトラックに乗せる。
③ペットボトルを出したいコンビニへ移動。
④ペットボトルをトラックに乗せる。
⑤ペットボトルのゴミステーションまで移動。
⑥ペットボトルを荷台から下ろす(プログラミング)
⑦粗大ゴミのゴミステーションまで移動。
⑧粗大ゴミを荷台から下ろす(プログラミング)

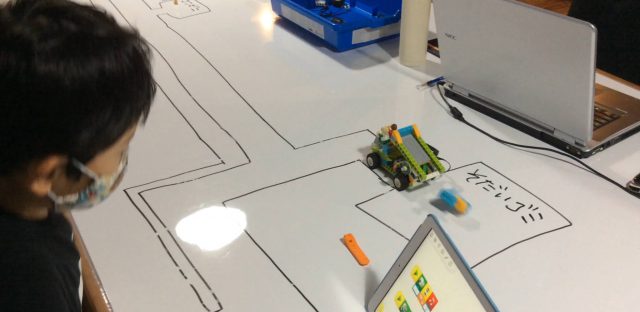
モーションセンサーを使う
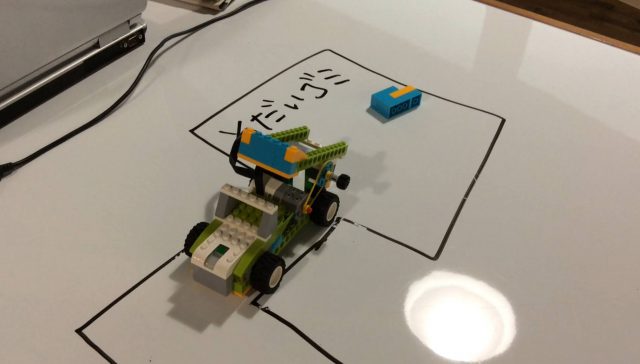
さらに改造を重ね、モーションセンサーを取り付けて、『ゴミをセンサーで感知したら音を鳴らす』というふうにプログラムしてみました。ハブのライト色もこだわって変えてみました!

本日の授業では、ゴミを分別しリサイクルすることでゴミは資源になる!という分別の大切さと、物事の順番(行程)を考える、ということを学びました。
*********************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくりの無料体験を行っております。
授業で実際に使用しているレゴ®WeDo2.0を使ってロボットを組み立て、動かしてみるところまでを体験いただけます。
お気軽にお申し込みください!
無料体験のお申込みはこちら