

レッスン風景【オフロードカー】デコボコ道を走る車
LEGO Educationシリーズの、WEDO2.0を使った授業をご紹介します。
今日のカリキュラムは【オフロードカー】です。
車といえば【速い車】が子供は大好き!
しかし、デコボコ道を走るのが得意な車もあります。
今日は『サスペンション』をきかせた車を作っていきます。
組み立てる
オフロードカーはとても組み立てが難しい車です。
いつものようにレゴブロックの間に隙間ができないようにしっかり組み立てていきます。

試し走行
完成です!
レゴブロックでデコボコ道を作り、試しに走らせてみました。

・・・すると、パワー最大の10でも途中で止まってしまいます。
デコボコが大きすぎたようです・・・汗;
改造
そこで、前輪を大きなタイヤへ変更してみました。


なんとかデコボコ道をクリア!!
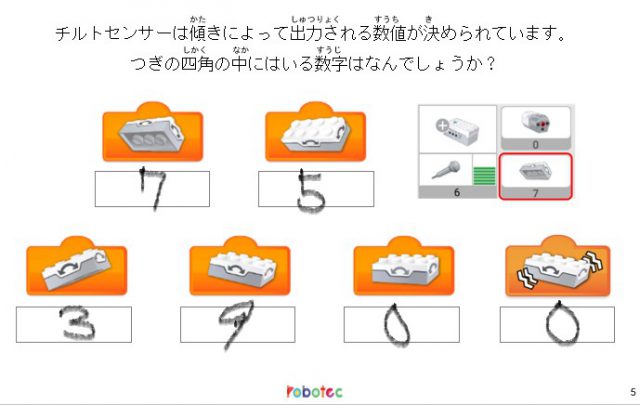
チルトセンサーを使う
チルトセンサーを使って、オフロードカーのパワーをコントロールすることも出来ます。
まずは、チルトセンサーがどの方向に傾いたときに、どんな数値で表示されるか確認します。

プログラム
①車が坂道を登るときはパワーをアップしよう!
②車が坂道を下るときはパワーをダウンしよう!

【メール】を使っていきます。
メールは『データを送る側』と、『データを受け取る側』両方のプログラムが必要となります。
『データを送る側』では、チルトセンサーが傾きを検知した時にメールを送ります。
『データを受け取る側』では、チルトセンサーが・・・
→0の傾きを検知した時(すなわち傾いていない時)→パワー4の力で。
→9の傾きを検知した時(すなわち坂道を登っている時)→パワー10の力で。
→3の傾きを検知した時(すなわち坂道を降っている時)→パワー1の力で。
・・・と設定しました。

今回使用した【メール】の機能はとても便利なプログラムブロックです。
次回は【マイロ】の続きの授業でメール機能を使って動かしていきたいと思います。
*********************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくりの無料体験を行っております。
授業で実際に使用しているレゴ®WeDo2.0を使ってロボットを組み立て、動かしてみるところまでを体験いただけます。
お気軽にお申し込みください!
無料体験のお申込みはこちら