

栃木市レッスン風景【ロボットアーム】でお菓子をゲットしよう!モーションセンサーを使ったプログラム
本日はLEGO Educationシリーズの、WEDO2.0を使って、【ロボットアーム】を作りました。
手が不自由な人の代わりに物をつかんだり、また工場などでも活躍したりしている【ロボットアーム】ですが、今日は作ったアームでお菓子をつかんで運ぶといった授業にしました。
お楽しみがあるとやる気が倍になりますよね♪
モーションセンサーを使って物を検知したら自動でアームが開くようにプログラムし、また、掴んだり離したりする時間もじっくり考えてプログラムを組み立ててもらいました。
ロボットアームを組み立てよう

今回作るのは【アーム】つまり、【手(腕)】の部分です。
人でいう親指の部分とそのほかの4本指の部分で物を挟めるような形となっています。
物をつかみやすくするために、ゴムのパーツを取り付けて滑りにくくなっているようです。
完成したらプログラムを作っていきます。
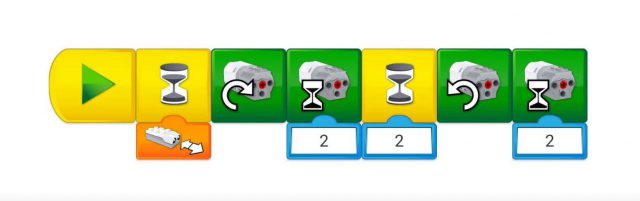
【先端に取り付けたモーションセンサーが物を検知したらアームを開く⇒2秒待ったら⇒閉じる】
といった基本のプログラムをまず最初に作りました。
動作確認。
プログラムが出来たら、基本の動作を確認しました。
ちょっと難しい、コンセントにプラグを差す、という動作です。


小さな穴に通すのはとっても難しそうでしたが、とりあえず動作確認をし、アームが開いたり閉じたりする時間を調整しました。
お菓子を設置しよう!
さあ、それでは本番です。
好きな駄菓子を選んでもらい、何か所かに設置しました。
お菓子をつかみやすくするために、高さを出したり、向きを整えたりと準備をしっかり行っていました。
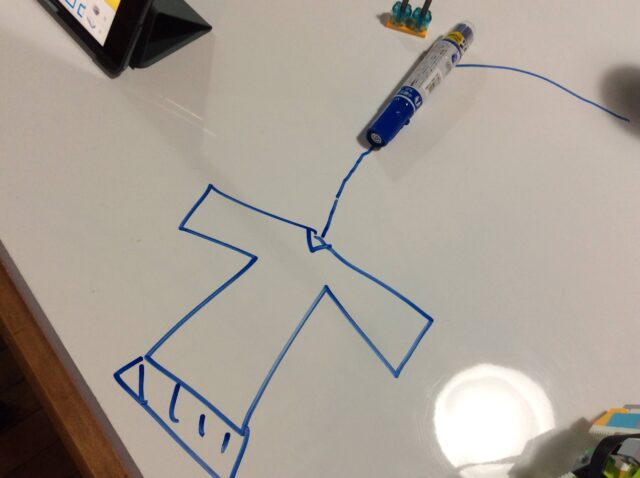
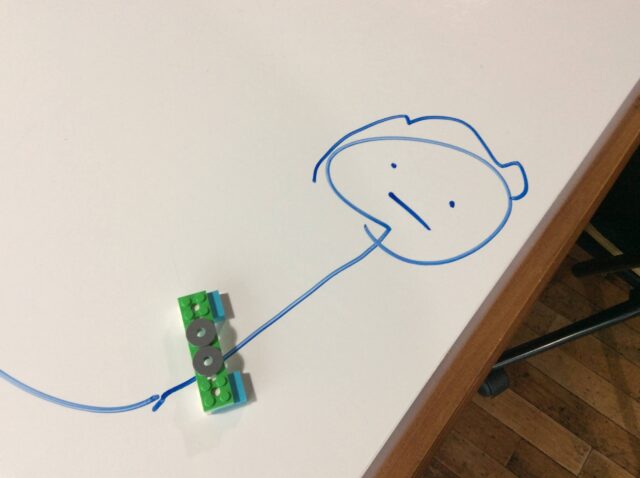
また、テーブルのホワイトボードにはササっとイラストを描いてくれて、ろくろっ首の女の子を描いてくれました(笑)
体から頭の部分まで運んで完了だそうです(笑)
自分で設定を考えてくれたので、イメージ通りにお菓子を運べるか?!いざ、勝負!!

プログラムを修正しよう
お菓子の準備が出来ました!
・・・がその前に、プログラムも修正しました。

アームが1回開いて閉じたらプログラムが終わってしまうので、設置した分のお菓子をすべて運べるように、【ループ】を付けました。
ループする回数は無限でいいんじゃない??と講師は言ったのですが、Yちゃんは完璧を目指します!!
4つのお菓子を置いたからチャンスは4回でいい!!
おお!ヒリヒリしますねぇ(笑)
よし!それではループに4回の条件を付けていよいよ実戦です!
アームで挟んでお菓子を運ぼう!



次々とテンポよくつかんでは指定の位置へ移動して離す。また戻ってつかんでは移動して・・・。
繰り返し運んで、見事、一回でイメージ通りに指定の場所へ運ぶことが出来ました!

久しぶりのwedoの授業でしたが、プログラムも自分で考えて組み上げることが出来ていました。
よく頑張りました♪
**************
ロボット・プログラミング教室ロボテックでは、子どもたちが興味を持つブロックという教材を通じて、強要されることなく自然な流れで課題を解決し、それを発表する、さらには他の人の意見に耳を傾けるという力を育んでいきます。
ロボテックでは、ロボットづくり・マインクラフトでゲームづくり の無料体験を行っております。
お気軽にお申し込みください!
無料体験のお申込みはこちら