

レッスン風景【オフロードカー】デコボコ道を走る車を作ろう!チルトセンサーを使ってパワーを調整してみよう!
LEGO Educationシリーズの、WEDO2.0を使った授業を行いました。
本日のカリキュラムは【オフロードカー】です。
オフロードカーってご存知ですか?
オフロードカーの最大の特徴は『四輪駆動であること』だそうです。
では『四輪駆動』とは何でしょう??
自動車で、前輪と後輪とをともに駆動して走行する方式。悪路走行に適する車ですね!
今回は、デコボコ道や坂道を作ってそれを乗り越えられる車を作っていきます。
オフロードカーを組み立てる
早速組み立てを行います。
オフロードカーは『四輪駆動』となっており、デコボコ道を走らせるために、4つのタイヤそれぞれに車軸を取り付けました。
また、クッション性を強化するためにゴムを装着しています。

完成→走行!
完成です!少し難しい組み立てでしたので時間もかかりますが、上手に組み立てられました!

早速走らせてみます!
その前にプログラムですね!
まずは簡単に、『前方向に進む』プログラムを組みました。
しっかり走りましたが、だいぶ遅いです。
車を作るとどうしても速さを求めてしまいがちですが、今日の車は坂道やデコボコ道に強い車です。
スピードよりパワーを意識して動かしていきます。
パワーは最初から最大値【10】で設定しました。
しかし、三段のブロックがどうしてもクリアできません・・・。
そこで、どうするか相談したところ、『タイヤを大きいものに変えて』みました。

今度はなんとかデコボコ道を越えることができました!!

坂道を登る
次の課題は【坂道を登ってみよう】です。
)チルトセンサーを使う
ただ登るのではなく、坂道を登るときに、【チルトセンサー】を使って、パワーを変えていきます。
ではどのように変えていくかというと・・・?
①上り坂ではパワーを上げる
②下り坂ではパワーを下げる
③平坦な道ではパワーを平均値で走る
といった条件をプログラムで組んでいきます。
)メールを使う
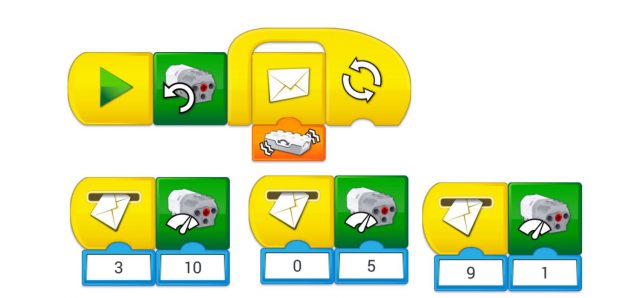
プログラムでは【メール】ブロックを使っていきます。
チルトセンサーは傾いた方向によって違った数値が表示されますので、まずはそれを調べてみました。
●前方向の傾き・・・9
●後方向の傾き・・・3
●右方向の傾き・・・5
●左方向の傾き・・・7
●傾き無し・・・0


チルトセンサーが上りの時にうまく反応せず、坂の角度を変えてみたり、タイヤの大きさを変えてみたりと、いろいろ検証しながら勧めていきました!
最終的には上手に動かすことができました。
車体が揺れたら止まる
最後に、もう一つ課題に取り組みました。
『車体が揺れたら車を止める』というプログラム。
チルトセンサーを使ってプログラムを次のように組んでみました。

ガタガタ道は乗り越えて、下り坂で止まる結果となりました。
なかなか思うように動きませんでしたが、改造を繰り返し、積極的に何度も検証を行ってくれたのは素晴らしかったですね!